1.はじめに
「ReBeL」は、igus社のローコストな協働ロボットです。
https://www.igus.co.jp/info/build-or-buy-servicerobot-rebel
今回はReBeLを使うための環境構築と、最小限の操作・プログラム運転を試してみました。
2.入手
ReBeL本体の入手
igus日本法人に問いあわせてください。
今回は「REBEL-6DOF-01」という型番を使いました。
https://www.igus.co.jp/product/21465
パソコンソフトウェア
ReBeLを扱うパソコンソフトウェアは「iRC – igus Robot Control Software」と呼ばれます。
https://www.igus.co.jp/info/robot-control-system
今回の型式、REBEL-6DOF-01のファームウェアのバージョンはV13です。iRCも同じバージョンのV13が必要になります。
ソフトウェアのダウンロードは、下記を参照してください。
- https://wiki.cpr-robots.com/index.php/IgusRobotControl-Release13-EN
- https://www.igus.co.jp/info/jp-lca-irc (↑上記のリンク先が「403 Not found」となるときは、こちらからダウンロードできます)
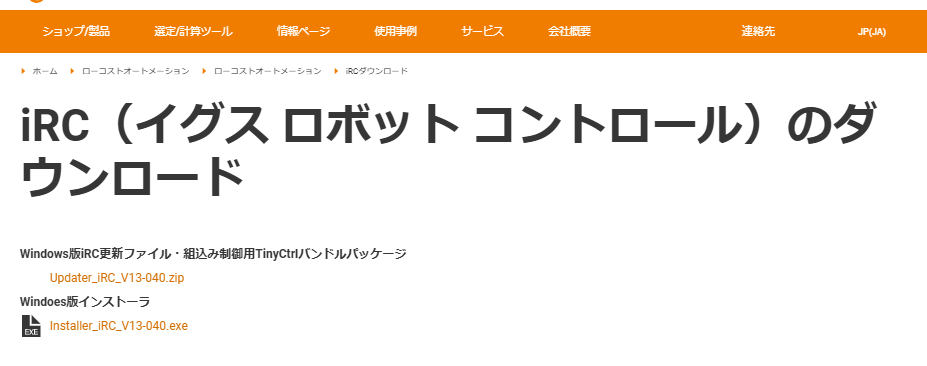
下段のWindows版インストーラ「Installer_iRC_V13-040.exe」を取得します。
(上段のZIPファイルは、ReBeL本体のファームウェアのアップデート用です)
ドキュメント
https://www.igus.co.jp/product/21465?artNr=REBEL-6DOF-02#download

特に上から3番目の資料「UserGuide_ReBeL_iRC-ENG.pdf」が参考になりますので、こちらを必ずダウンロードのうえ予習してください。
3.セットアップ・ReBeL

安定した机にしっかり固定します。
4.セットアップ・iRC
先ほど取得したインストーラ「Installer_iRC_V13-040.exe」を実行します。下記ディレクトリに展開されて、デスクトップにソフトウェア「igus Robot Control」のショートカットが作られます。
C:\iRC-igusRobotControl\
Mode LastWriteTime Length Name
---- ------------- ------ ----
d----- 2025/03/02 14:41 Bin
d----- 2025/03/02 14:41 Data
-a---- 2025/03/02 15:30 743 CPRFrontend.xml
-a---- 2025/03/02 14:41 1478 install.log
-a---- 2023/04/05 17:26 161485 Licenses.pdf
-a---- 2023/04/05 17:26 110104 logo32.ico
-a---- 2025/03/02 15:30 2770 startUp.log
-a---- 2025/03/02 14:41 60901 Uninstall.exe
-a---- 2025/03/02 16:33 514 variableStorage.xml
5.接続
ReBeL本体に附属の「クイックスタート」マニュアルを参考につなげていきます。
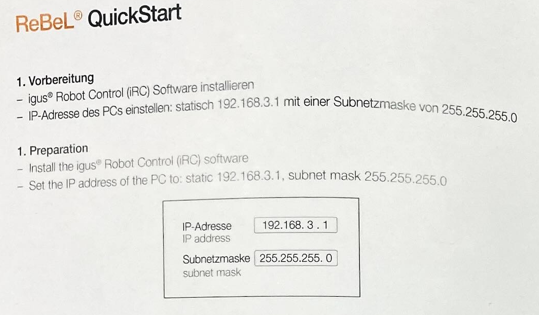
ReBel側のIPアドレスは、192.168.3.11が予め設定されています。
従って、パソコン側も、192.168.3.*のIPアドレスを割り当てます。
ここではパソコン側のIPアドレスは、192.168.3.100としました。
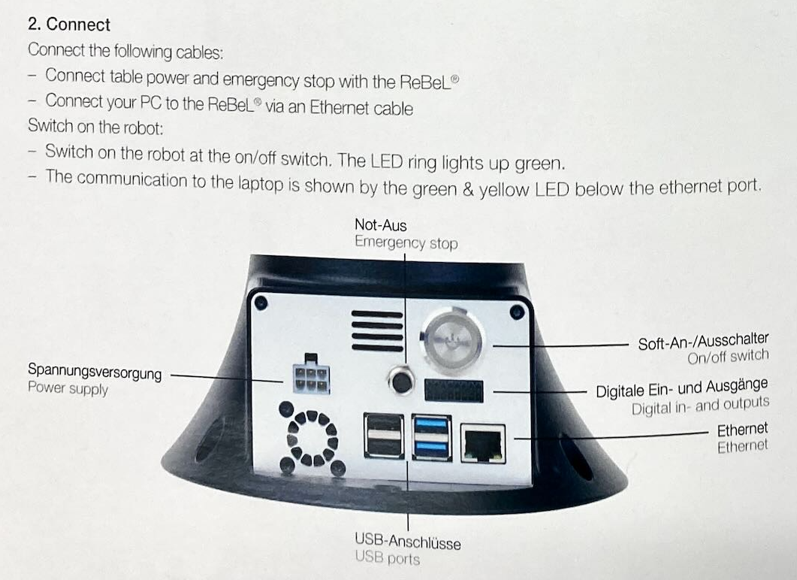
パソコンのLANポートと、ReBeLのLANポートは直結しておきます。

非常停止ボタンを接続します。
電源を接続します。
On/Off switchを1回押し込んで、ReBeLの電源を入れます。
黄色点灯中は、起動中を示します。
| Green | no error, axes enabled. |
| Red | error or axes not enabled. The error code is displayed in iRC. |
| Orange | integrated robot controller not yet connected (startup), please wait. |

次に、パソコン側のiRCソフトウェアを起動します。
デスクトップにショートカットがあります。
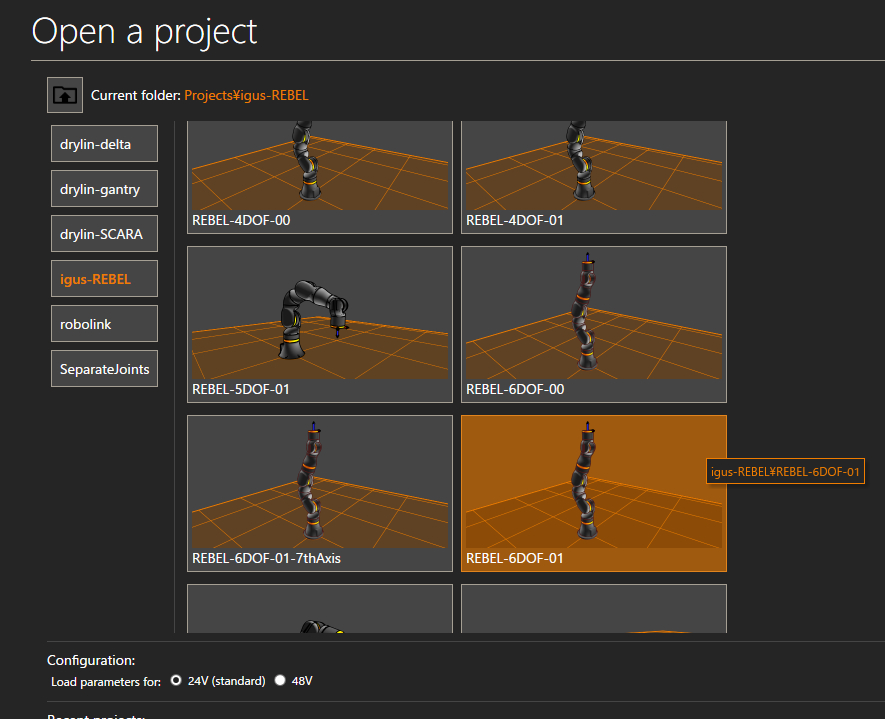
初回起動の際は、操作対象のロボットの型式を指定する必要があります。
ここでは「REBEL-6DOF-01」を指定します。
次に、ロボット本体とパソコンとの通信の接続をします。
ツールバーの右上「Connect」をクリックします。

「Download Program」のダイアログが出てきます。
ここでは「Load All」ボタンをクリックします。
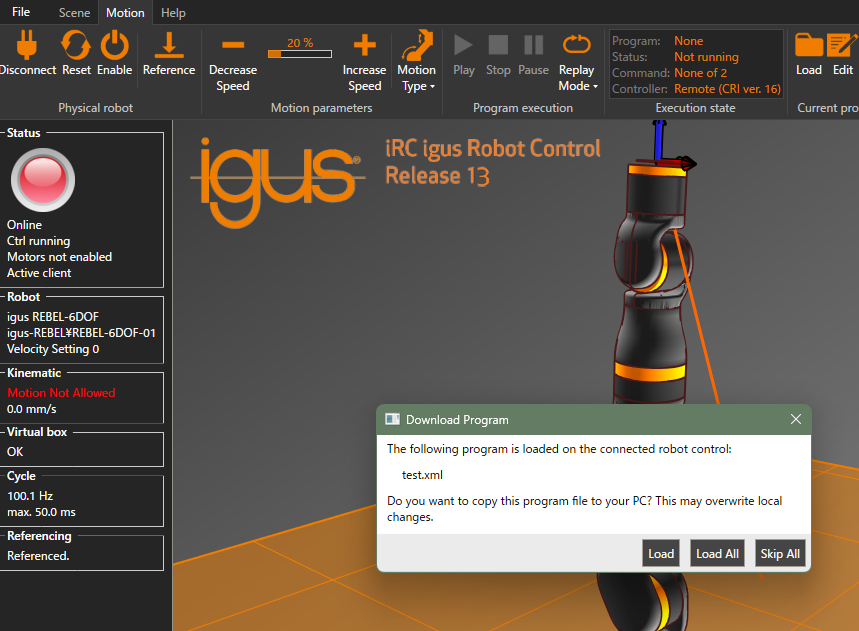
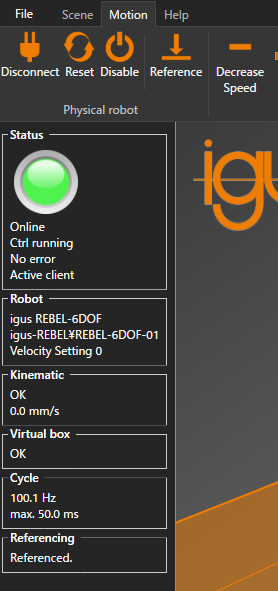
接続して、StatusがOnlineになりました。

6.JOG操作
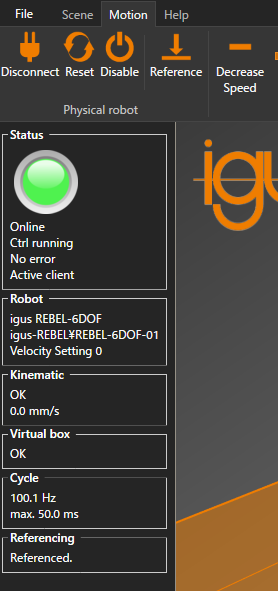
ツールバーの左上、「Enabe」をクリックすると、Statusのランプが赤→緑に切り替わります。
このとき、ブレーキが「かちっ」と外れる音がします。
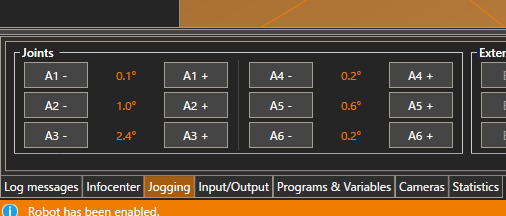

ウィンドウの下部「Jogging」タブの、「Joints」が操作できるようになります。
それぞれの軸をクリックすると、ロボットが動きます。
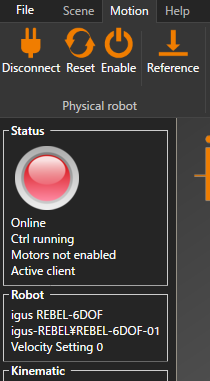
7.非常停止操作
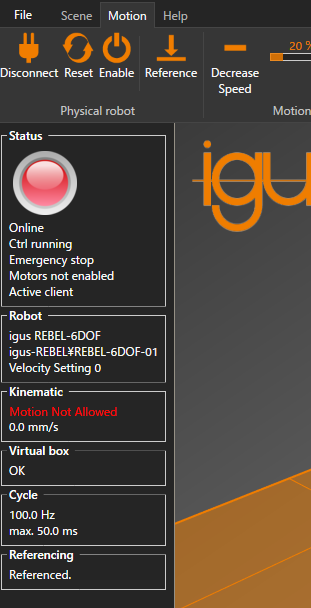
非常停止ボタンを押します。
Statusが、緑→赤色に変わります。
ツールバーの右上「Enable」に切り替わっています。
Kinematicの欄が赤文字で「Motion Not Allowed」に切り替わっています。
非常停止ボタンを元の位置に戻します。
ツールバーの右上「Reset」ボタンをクリックします。
再びロボットが動けるようになります
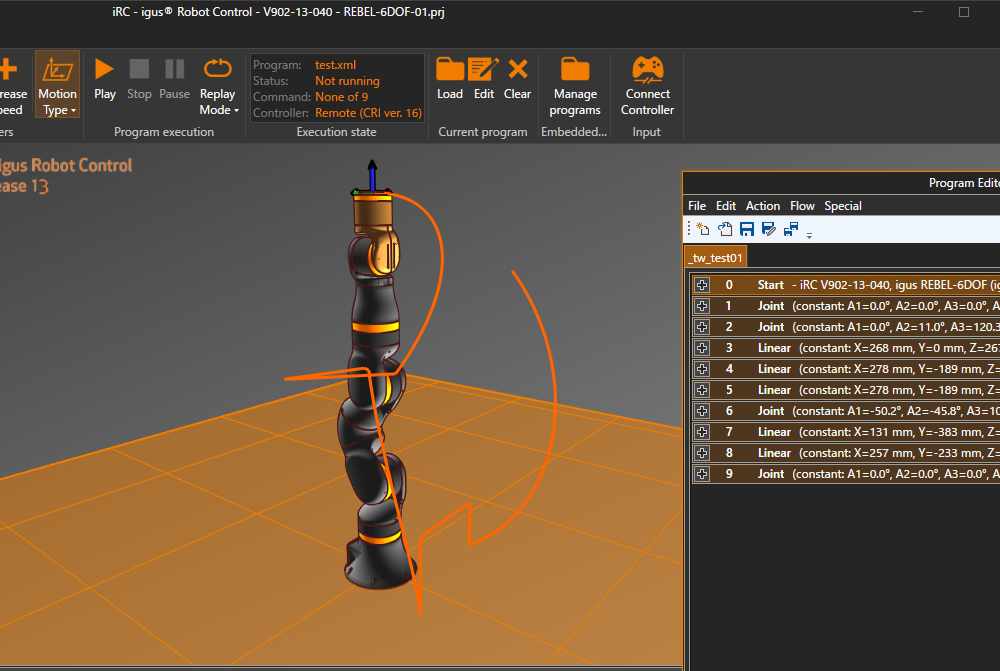
8.プログラムの読み込みと実行
ツールバーの右上に、位置決め情報を予め定義したファイルの操作があります。
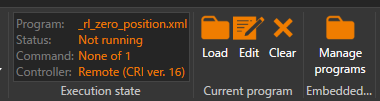
「Load」ボタンを押します。サンプルファイルが幾つか入っています。


ファイル:_rl_park_position.xml
直立位置と、やや斜めの位置を往復します。
<?xml version="1.0" encoding="utf-8"?>
<!-- values in mm and degree -->
<Program>
<Header />
<Joint Nr="0" a1="0" a2="0" a3="0" a4="90" a5="0" a6="0" e1="0" e2="0" e3="0" velPercent="50" acc="100" smooth="0" AbortCondition="false" Descr="" />
<Joint Nr="1" a1="0" a2="-50" a3="25" a4="90" a5="0" a6="0" e1="0" e2="0" e3="0" velPercent="50" acc="100" smooth="0" AbortCondition="false" Descr="" />
</Program>

ファイル:_rl_zero_position.xml
直立位置に移動します。
ReBeLの箱に収納する際は、この位置に移動します。
<?xml version="1.0" encoding="utf-8"?>
<!-- values in mm and degree -->
<Program>
<Header />
<Joint Nr="0" a1="0" a2="0" a3="0" a4="90" a5="0" a6="0" e1="0" e2="0" e3="0" velPercent="50" acc="100" smooth="0" AbortCondition="false" Descr="" />
</Program>
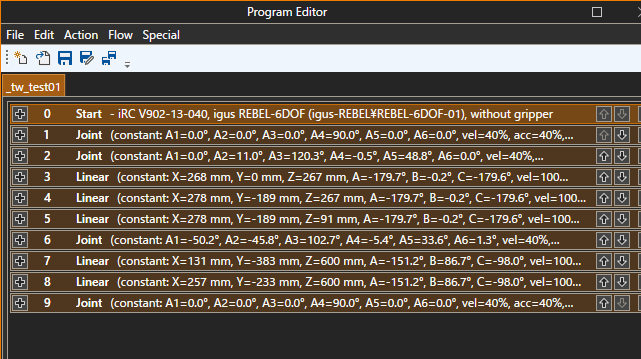
8.オリジナルのプログラムの作成と実行
(作成中)
Appendix その他資料
- 開発者向けWiki
- https://wiki.cpr-robots.com/index.php/CPR_Wiki
- 注意:各種ソフトウェアのダウンロードはできません。(リンク先が消えています)
- RealVirtual.io – 開発支援
- ROS2対応